Weixi Situ*1, Hanjing Ye*1, Jianwei Peng1, Yu Zhan1, Hong Zhang1
1Southern University of Science and Technology (SUSTech)
*Indicates Equal Contribution
Robot person following (RPF) is a core capability in human-robot interaction, enabling robots to assist users in daily activities, collaborative work, and other service scenarios. However, achieving practical RPF remains challenging due to frequent occlusions, particularly in dynamic and crowded environments. Existing approaches often rely on fixed-point following or sparse candidate-point selection with oversimplified heuristics, which cannot adequately handle complex occlusions caused by moving obstacles such as pedestrians. To address these limitations, we propose an adaptive trajectory sampling method that generates dense candidate points within socially aware zones and evaluates them using a multi-objective cost function. Based on the optimal point, a person-following trajectory is estimated relative to the predicted motion of the target. We further design a prediction-aware model predictive path integral (MPPI) controller that simultaneously tracks this trajectory and proactively avoids collisions using predicted pedestrian motions. Extensive experiments show that our method outperforms state-of-the-art baselines in smoothness, safety, robustness, and human comfort, with its effectiveness further demonstrated on a mobile robot in real-world scenarios.
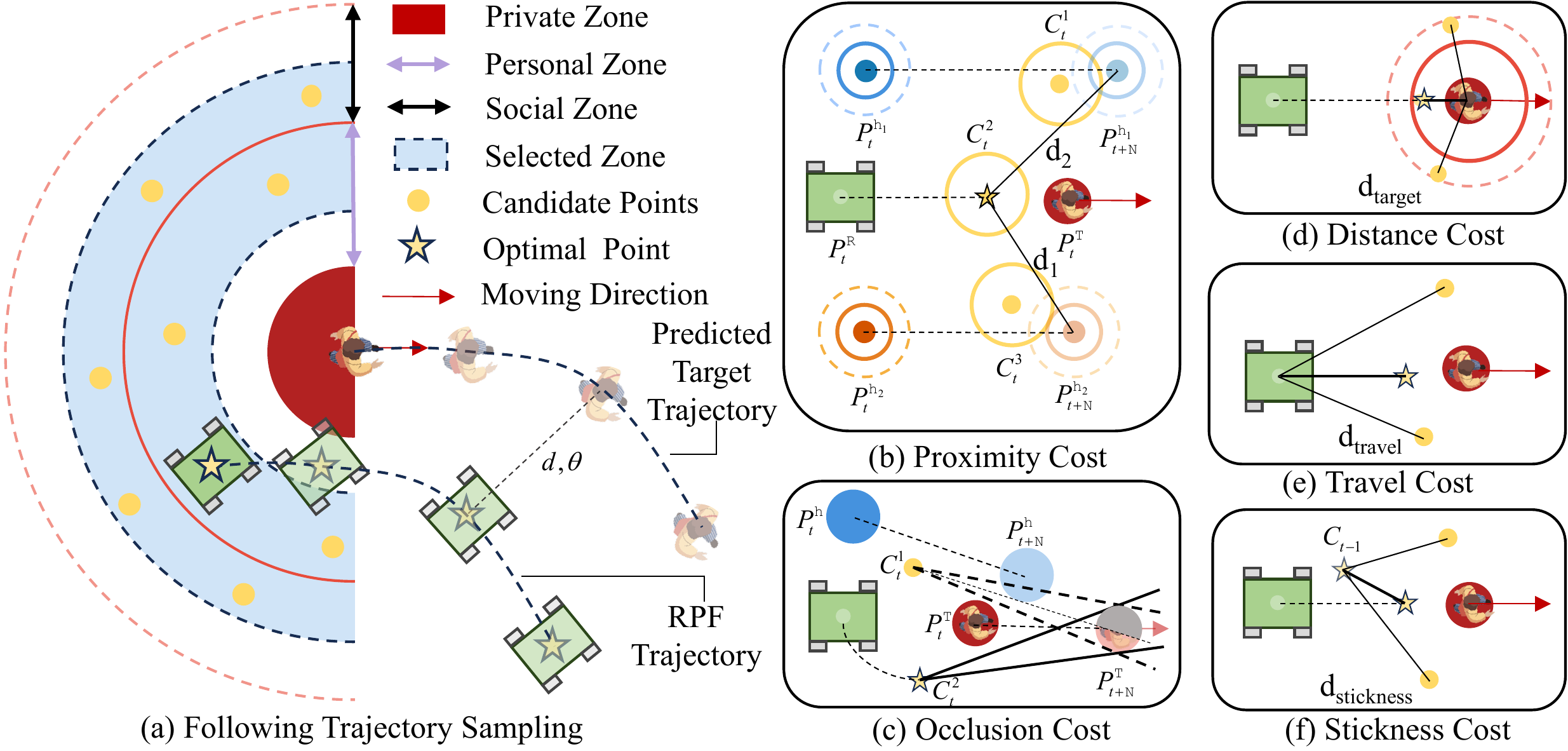
Target-centric Adaptive Following Trajectory Sampling. (a) Following Trajectory Sampling. Candidate following points are generated using Sobol sampling within a target-centric semi-annular region defined by the target’s personal and social zones. The candidates are evaluated using a multi-objective cost function that accounts for target visibility, collision risk, social compliance, and smoothness. A following trajectory is then constructed relative to the predicted target trajectory using an offset (d, θ) based on the selected optimal point. (b) Proximity Cost. Minimum distance d1 to surrounding pedestrians is computed from predicted trajectories and social zones; candidates intruding into personal space (e.g., Ct3, Ct1) are discarded, and Ct2 is selected. (c) Occlusion Cost. Occlusion is estimated via IoU between pedestrian and target projections (Pt+Nh and Pt+NTar) using predicted trajectories; Ct1 is rejected due to partial occlusion (light gray), whereas Ct2 remains visible. (d) Distance Cost. Penalizes deviation from the desired spacing to the target. (e) Travel Cost. Encourages minimal path effort from the robot’s current position (green rectangle PtR). (f) Stickiness Cost. Promotes continuity by favoring points near the previously selected following point.
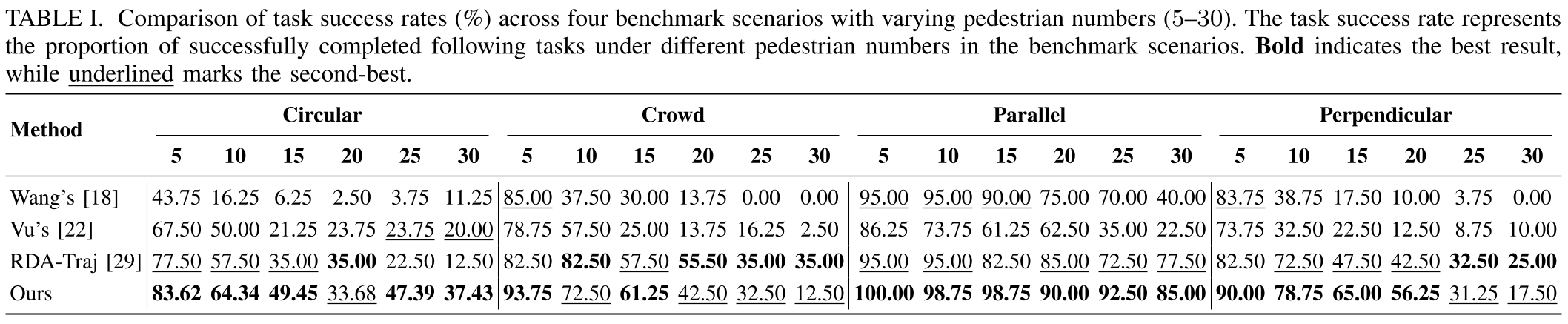
To evaluate the performance of target visibility and following performance on the benchmark, we compare our Adap-RPF method with several baselines categorized as follows: (1) Multiple Predefined Following Points. Vu's Method adopts a similar frame-sample-evaluate-plan approach to ours but leverages current scene observations for following points selection and local planning. (2) Optimization-based. Wang's Method is the first to propose maintaining target visibility in RPF by formulating an optimization function within the NMPC framework, incorporating multiple constraints. (3) Fixed Following Point. RDA Planner Trajectory Following (RDA-Traj) achieves SOTA performance in the public benchmark. Our method outperforms others in most case.
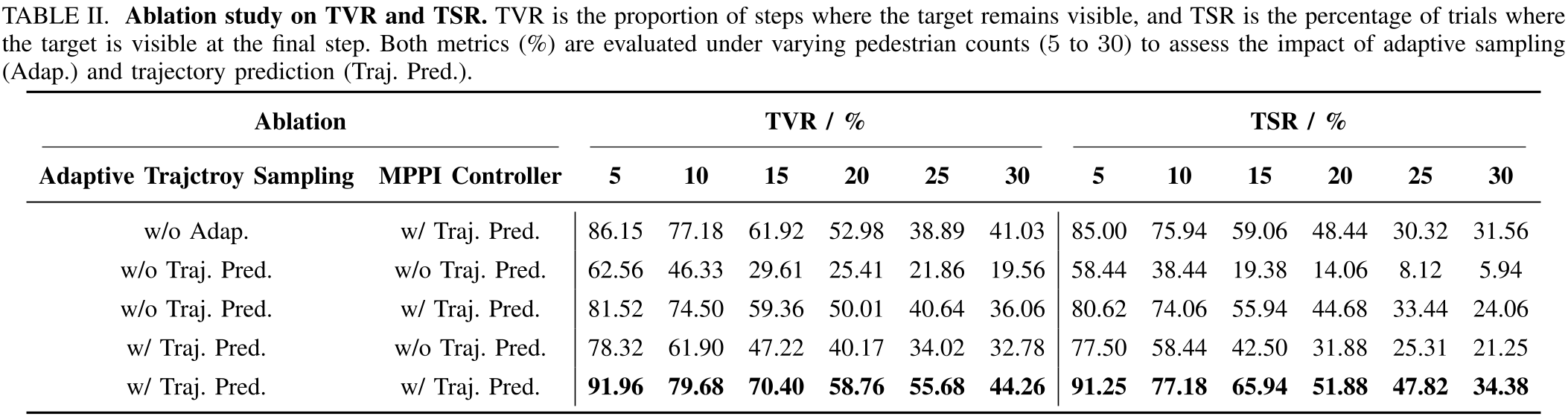
To assess the contributions of adaptive trajectory sampling and human trajectory prediction for it and MPPI, we conduct ablation studies using TVR and TSR as evaluation metrics. The best performance is achieved when these components are effectively combined.